Projects
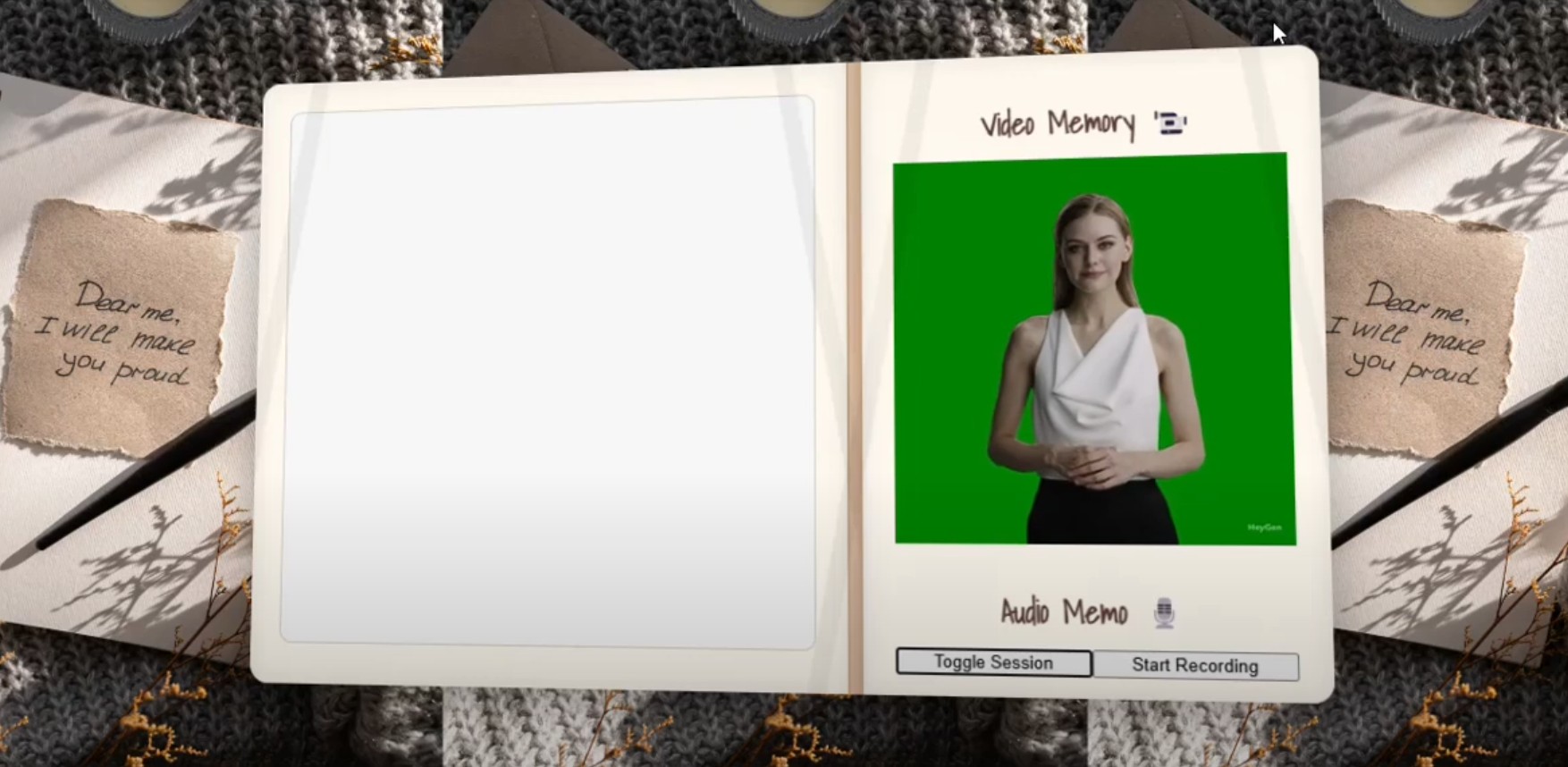
Ansh.AI: Conversational Diary Companion
March 2025Built an empathetic AI for self-reflection using LangChain and HeyGen for natural conversations. Enabled real-time memory with ChromaDB for personalized insights and pattern recognition. Developed with Python, Flask, React, and AMD Minisforum AI 370 for NPU+GPU compute.

Autonomous Driving Challenge with AWS DeepRacer
August 2024 - December 2024Built a 1/18-scale autonomous vehicle using ROS 2 Humble on Raspberry Pi 4, navigating via RGB camera-based blue line following and LiDAR odometry. Applied HSV thresholding and contour detection with OpenCV for traffic sign detection, achieving ~80% stop sign accuracy, and implemented EKF SLAM for robust localization. Designed a modular ROS 2 system with nodes for camera processing, line detection, PID control, and slam_toolbox for real-time mapping and Tkinter-based telemetry visualization.
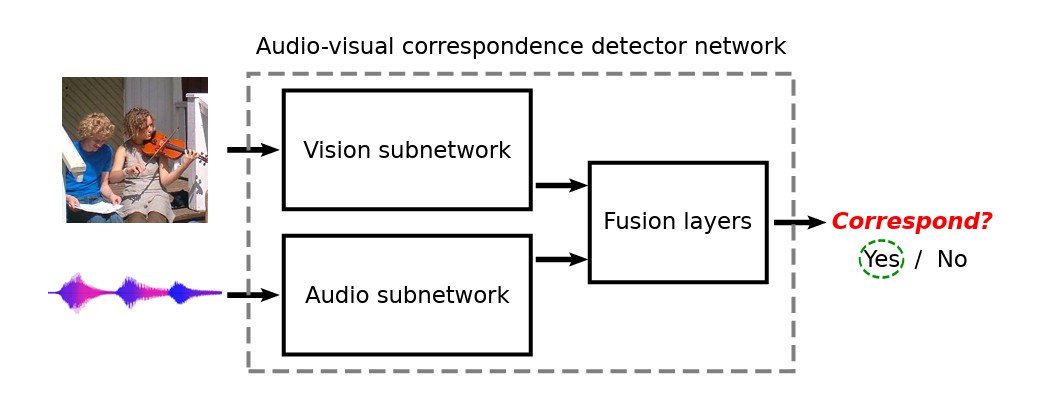
Audio-Visual Correspondence Task using Few Shot Learning
December 2021 - June 2022Successfully reproduced the results from the "Look Listen & Learn" paper, implementing the L3Net model for audio-visual correspondence tasks using few-shot learning techniques.
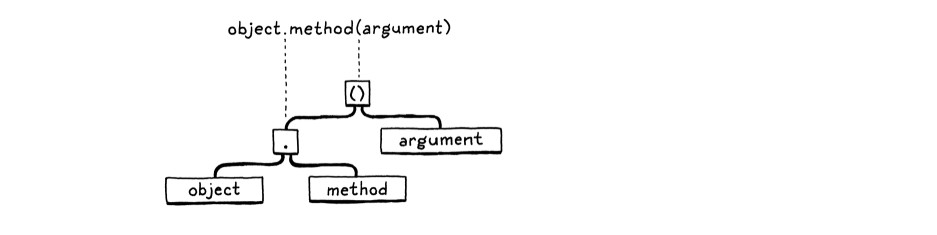
Lox: Interpreter for Python-like Language
2023Built an end-to-end interpreter that takes Python-like syntax, implementing features such as parsing, control flow, hashes, garbage collection, and superclasses.

V-BIKES: Enhanced Safety Measures for Two-Wheeler Vehicles
2022Developed an array of non-evasive sensors for collision detection in a helmet with end-to-end support for immediate ambulance alert and injury profile using ESP32 Kit.